
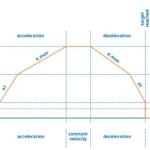
How a motor ramps its angular position or rotational velocity from a starting point to the intended target value is a complicated topic which modern motor controllers address in many ways.
Part 2 of this article looked at the basic ramping trajectories of the motion-control system. This final part briefly explores some standard motion-control ICs and embedded modules available from several vendors. (Embedded modules are PC boards with motion-control functions intended to be placed within another system or enclosure; this is in contrast to complete, ready-to-use motion controllers that come with a chassis, power supply, enclosure, switchers, controls, and display.)
A list of the vendors of motion-control components and modules (subsystems) would be very long. There are several reasons for this abundance of vendors: it’s a huge and fast-growing market covering motors ranging from small to fairly large; it’s an application where improved control results in many benefits in performance and cost; many of the design-ins have a long life; and it is not a “commodity” application meaning that many of the vendors can offer proprietary approaches using their “secret sauce” which gives them a marketing and technical edge.
Potential users of advanced motion-control products can look to different classes of solutions:
1) Mainstream, broad-line vendors of analog and mixed-signal ICs, who have taken programmable devices (microcontrollers, microprocessors, and even FPGAs) and enhanced them for this application. Examples include Texas Instruments, STMicroelectronics, and Infineon.
2) Specialty IC and board/module vendors who focus exclusively on motion control with products largely pre-programmed for this application. These vendors maintain that they have additional expertise, hands-on experience, and customer contacts and experience. One such vendor is Performance Motion Devices.
3) Boards and modules which include a motion-control IC core plus peripheral functions for system and supervisory processor I/O as well communications links, motor drivers, and other motor-related functions; one such vendor is Trinamic Motion Control GmbH.
A representative offering in each category shows their similarities, differences, and overlap:
1) Texas Instruments has the TMS320F28002x family of real-time microcontrollers optimized for real-time control of motors. It includes a 32-bit, 100 MHz DSP core, an IEEE 754 floating-point unit (FPU), support for fast integer division (FINTDIV), a trigonometric math unit (TMU), and support for nonlinear proportional integral-derivative (NLPID) control, as well as various timers and sequencers.
To support this family, TI offers the TIDA-00143 reference design for a BLDC motor controller and is designed to drive motors in the 60 W/5 A range, Figures 1 and 2. The motor’s command and status can be communicated through the standard JTAG connector or PWM input and output signals. Users can also re-program the microcontroller through the JTAG connector, allowing customization to a wide variety of applications.
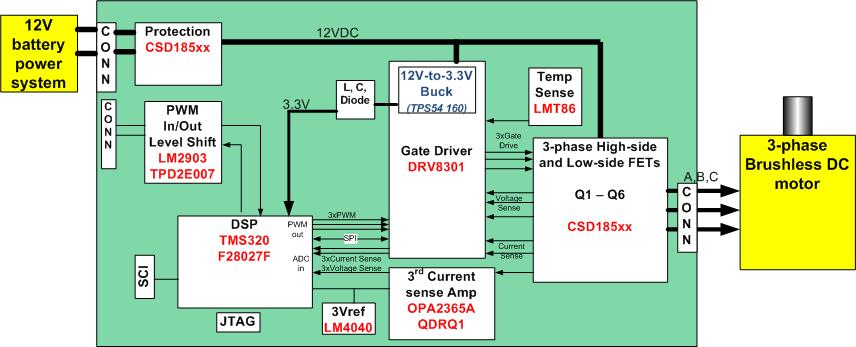

Hardware alone is not enough for a reference design such as this. TI offers their MotorWare™ software and documentation package to enable designers to develop software for sensor and sensorless BLDC motors and FOC control. Among the algorithms and features, it can implement are speed and torque control, various profiles, initial-position detection, and advanced velocity- and position-controller tuning. On one side, this solution offers considerable flexibility; on the other, the user must put in time and effort to develop the final design (hardware and software) and match it to the application.
2) Vendors such as Performance Motion Devices specialize in motion-control ICs and subsystems, offering ICs, modules, and PC cards. Their Juno series is a family of velocity- and torque-control ICs for brushless DC, brushed DC, and stepper motors (Figure 3). Among their many features, these compact motor-control ICs offer full four-quadrant control, a direct quadrature-encoder input, profile generation, and advanced digital=current control.
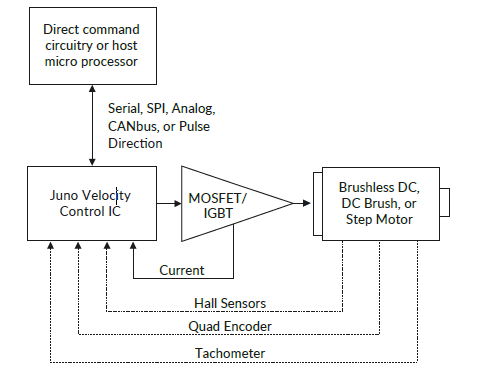
Juno ICs provide motor commutation, microstep generation, pulse and direction, internal profile generation, and much more, depending on the type of motor being controlled. Juno ICs interface to external bridge-type switching amplifiers and use Performance Motion Device’s proprietary current and switch-signal technology for ultra-smooth operation. A special outer control loop allows a wide range of motor-related control applications, including pressure, flow rate, and temperature control.
Their Pro-Motion application package is an advanced, Windows-based exerciser program for use with Juno ICs as well as their other motion-control ICs, modules, and cards (Figure 4). It can be used with their C-Motion for a complete, easy-to-use, motion programming language that includes a source library containing all the code needed to implement desired motion design requirements. Using this IC and the application support requires relatively less understanding of the circuitry and supports focusing on the characteristics of the intended end-use.

3) For complete PC boards as modules, TRINAMIC Motion Control has the TMCM-1321 single-axis servo controller/driver module with integrated motion control (Figure 5). This module, measuring just a 28 × 28 mm square and 20 mm high, (Figure 6), enables two-phase bipolar stepper motors in robotics and automation equipment to optimize speed and synchronization of axes.
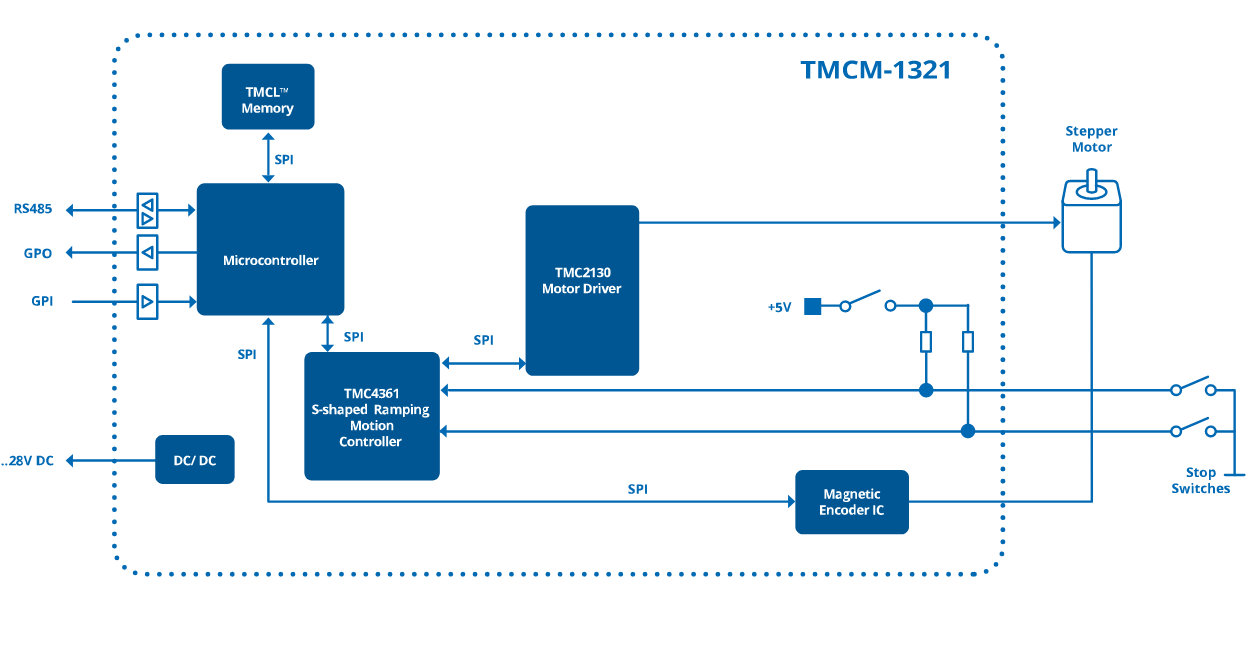
The TMCM-1321 module features linear ramping, their proprietary Six-Point™ ramping, as well as advanced S-shaped ramping to speed effective transfer time. The closed-loop technology uses direct feedback to reduce power loss by as much as 75 percent automatically. It also includes direct digital I/O connections for a needed feature such as emergency STOP switches.
Given the wide array of available broad types of motion-control offerings, as well as the many specific vendors and product choices within each type, designers can have almost too much of a good thing. Obviously, it’s critical to consider many factors when looking to make the “right” choice. Among these are in-house expertise in motion control, uniqueness of application, time to market, cost, available tools, vendor application resources, preference for a “make” versus “buy” solution, and ability to model the entire motion-control system, including motor and its load with confidence and fidelity (often the most difficult part of the design).
This article has looked into motion control and profile trajectories and available classes of available hardware and software, which addresses the specific approaches offered in the motion-control market. It’s a busy and vibrant area from any operative.
EE World Related Content
Basics of AC, DC, and EC electric motors, Part 1— AC and DC
Basics of AC, DC, and EC electric motors (Part 2) — EC and stepper
What is Proportional (PID) Control and why is it used? (Part 1)
Motor field-oriented control, Part 1: Principles
Motor field-oriented control, Part 2: Implementation
Motion control ICs handle advanced velocity control of servomotors
Motor controller includes three-phase gate driver and voltage regulator
References
Performance Motion Devices, “Servo Motor Tuning – Rocket Science or Walk In the Park?”
Performance Motion Devices, “New Control Technique Combines Servo Performance With Step Motor Cost”
Performance Motion Devices, “Mathematics of Motion Control Profiles”
Performance Motion Devices, “S-Curve Motion Profiles – Vital For Optimizing Machine Performance”
Performance Motion Devices, “Juno Family of Velocity & Torque Control ICs”
Trinamic Motion Control, “Motion Control Technology”
Trinamic Motion Control, “TMCM-1321 servo controller/driver module”
Texas Instruments, Application Note SPRABQ7A, “Sensorless Trapezoidal Control of BLDC Motors (Rev. A)”
Texas Instruments, Application Note SLYT568, “Closed-loop motor control: An introduction to rotary resolvers and encoders”
Texas Instruments, Application Note SPRABZ3, “Sensorless Trapezoidal Control of BLDC Motors”
Texas Instruments, “TIDA-00143 BLDC Motor Controller Reference Design”


Leave a Reply