
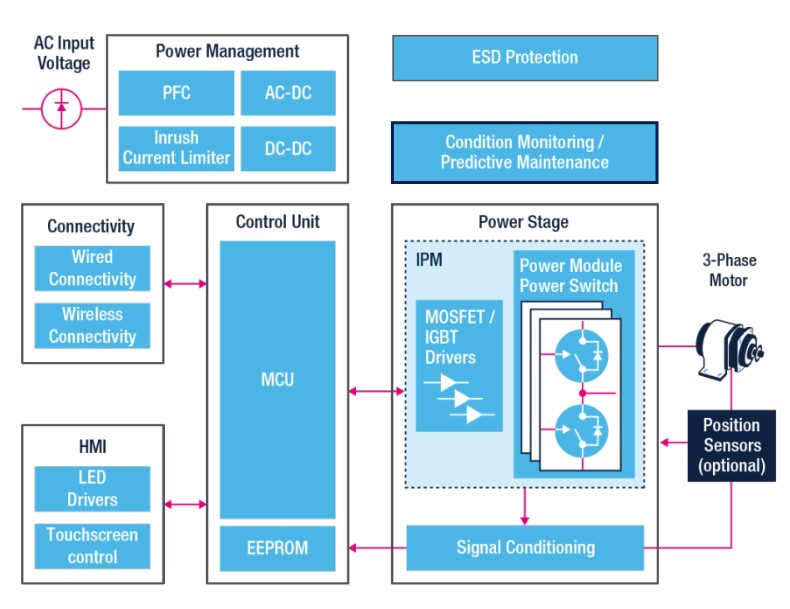
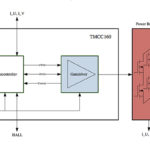
AC drives are used to bring about the process and quality improvements in industrial and commercial applications’ acceleration, flow, monitoring, pressure, speed, temperature, tension, and torque. Most basic AC drives include a rectifier section, a DC link, an inverter, and a control section, usually based on a microcontroller or microprocessor. There are several drive topologies and control mechanisms used to implement AC motor drives and controllers.
Fixed-speed loads subject the motor to a high starting torque and to current surges that are up to eight times the full-load current. AC drives are used to gradually ramp the motor up to operating speed to lessen mechanical and electrical stress, reducing maintenance and repair costs, and extending the life of the motor and the driven equipment.
Variable-speed drives can also run a motor in specialized patterns to minimize mechanical and electrical stress further. For example, an S-curve pattern can be applied to a conveyor application for smoother deceleration and acceleration control, which reduces the backlash that can occur when a conveyor is accelerating or decelerating.
AC motor drive applications can be categorized as single-quadrant, two-quadrant, or four-quadrant, with the four quadrants are defined as follows:
- Quadrant I – Driving or motoring, forward accelerating with positive speed and torque.
- Quadrant II – Generating or braking, forward braking or decelerating with positive speed and negative torque
- Quadrant III – Driving or motoring, reverse accelerating with negative speed and torque
- Quadrant IV – Generating or braking, reverse braking, or decelerating with negative speed and positive torque.

Most applications involve single-quadrant loads operating in quadrant I, such as in variable-torque (e.g., centrifugal pumps or fans) and certain constant-torque (e.g., extruders) loads.
Certain applications involve two-quadrant loads operating in quadrant I and II, where the speed is positive. Still, the torque changes polarity as in the case of a fan decelerating faster than natural mechanical losses. Some sources define two-quadrant drives as loads operating in quadrants I and III, where the speed and torque are the same (positive or negative) polarity in both directions.
High-performance applications can involve four-quadrant loads (quadrants I to IV). The speed and torque can be in any direction, such as in hoists, elevators, and certain conveyor designs. Regeneration can occur only in the drive’s DC link bus when inverter voltage is smaller in magnitude than the motor back-EMF, and inverter voltage and back-EMF are the same polarities.
AC drive topologies
AC drives can be classified according to the following generic topologies:
- Voltage-source inverter (VSI) drive topologies: use a capacitor bus to store the DC output of the diode-bridge converter to supply stiff voltage input to the inverter. The vast majority of drives are VSI type with PWM voltage output.
- Current-source inverter (CSI) drive topologies: use a series inductor to store the DC output of the SCR-bridge converter to supply stiff current input to the inverter. CSI drives can be operated with either PWM or six-step waveform output.
- Load commutated inverter (LCI) drive topologies: is a subset of CSI where the DC output of the SCR-bridge converter stores energy via DC link inductor circuit to supply stiff quasi-sinusoidal six-step current output of a second SCR-bridge’s inverter and an over-excited synchronous machine.
- Cycloconverter or matrix converter (MC) topologies are AC-AC converters with no intermediate DC link for energy storage. A cycloconverter operates as a three-phase current source via three anti-parallel-connected SCR-bridges in a six-pulse configuration. Each cycloconverter phase acts selectively to convert fixed line frequency AC voltage to an alternating voltage at a variable load frequency. MC drives are IGBT-based.
- Doubly fed slip recovery system topologies: feed rectified slip power to a smoothing reactor to supply power to the AC supply network via an inverter; the motor’s speed is controlled by adjusting the DC current.
Drive control methods
The direct conversion includes cyclo-converters and other matrix topologies where the input ac power is directly converted to variable ac power in a single stage. These VFDs are used where rotation speeds are relatively slow, and torque demands are high. Direct conversion VFDs generate large harmonic currents and can be found in ship propulsion, metal rolling mills, ore grinding mills, and similar applications.
In pulse-width modulated (PWM) V/Hz control, the speed of the induction motor is controlled by the adjustable magnitude of stator voltages and frequency in such a way that the air gap flux is always maintained at the desired value at the steady-state. Sometimes this scheme is called the scalar control because it focuses only on the steady-state dynamic.
Scalar control is a simpler form of motor control, using non-vector controlled drive schemes. An AC induction motor can be led to a steady state by simple voltage fed, current-controlled, or speed controlled schemes. The scalar variable can be manipulated after obtaining its value either by direct measurement or calculation and can be used in both open-loop and closed-loop feedback formats. Although its transient behavior is not ideal, a scalar system can produce a satisfactory steady-state response.
In order to achieve better dynamic performance, a more complex control scheme needs to be applied to control the motor. With the microcontrollers’ mathematical processing power, advanced control strategies can be implemented, which use mathematical transformations to control AC machines like DC machines, providing independent control of flux and torque producing currents. Such de-coupled torque and magnetization control is commonly called PWM field-oriented control (FOC) or vector control.

Direct torque control (DTC) is a third method used in variable-frequency drives to control the torque (and therefore the speed) of three-phase AC motors. DTC involves calculating an estimate of the motor’s magnetic flux and torque based on the motor’s measured voltage and current. Stator flux linkage is estimated by integrating the stator voltages. Torque is estimated as a cross product of the estimated stator flux linkage vector and measured motor current vector. The estimated flux magnitude and torque are then compared with their reference values. If either the estimated flux or torque deviates too far from the reference value, the VFD is turned off and/or on in such a way that the flux and torque errors will return to within their acceptable limits as fast as possible.
That concludes this FAQ series on electric motors. It started with “motor fundamentals and DC motors,” proceeded to look into “driving brushed and brushless DC motors,” and moved on to “AC motors and applications” before concluding with this FAQ.
References:
AC Drives, STMicroelectronics
AC Motor Control Algorithms, Renesas Electronics
Scalar (V/f) Control of 3-Phase Induction Motors, Texas Instruments
Variable-frequency drive, Wikipedia

It is very useful, thank you