
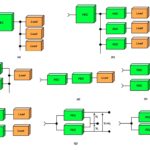
Distributed power architectures (DPAs) are many and varied. DPAs, including the dynamic bus architecture and the intermediate bus architecture, are evolving as a result of new power demands from FPGAs, CPUs, GPUs, ASICs. And the concept of a DPA has extended into distributed power control architectures (DPCAs) being developed for electric vehicle charging stations, renewable […]
FAQ
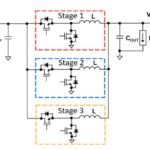
Technology trends for increased PoL power densities
The power density of point of load (buck) converters (PoLs) has been increasing for several decades. It is driven by a combination of component improvements and advanced power conversion technologies that produce the increases in power conversion efficiencies needed to support higher power densities. Where are we now? And what’s next? Power density is an […]
What’s a voltage regulator module?
A voltage regulator module (VRM) is a specialized point-of-load (PoL) power converter, sometimes called a processor power module (PPM). Like other PoLs, VRMs are buck converters. They are specifically designed to convert a 5V or 12V bus to a specific voltage needed to power a central processing unit (CPU) or graphics processing unit (GPU) in […]
What are Point-of-Load converters?
Point-of-load converters (PoLs) are used in distributed power architectures (DPAs) to step down a relatively high power distribution bus voltage to the lower voltages needed by system components such as microprocessors, ASICs, and other digital ICs. DPAs are used in systems of all sizes to improve power distribution efficiency. Larger systems tend to use higher […]
Energy storage by the Farad, Part 3: Hybrid supercapacitors
For operating and backup power and energy storage, engineers can choose among batteries, supercapacitors, or “best of both” hybrid supercapacitors. Just as with rechargeable batteries, supercapacitors need proper management to optimize their performance and avoid mishaps. In many ways, the supervisory requirements for both are similar but there are some differences. Vendors of power-management ICs […]
Energy storage by the Farad, Part 2: Supercapacitors & batteries
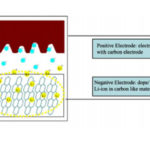
For operating and backup power and energy storage, engineers can choose among batteries, supercapacitors, or “best of both” hybrid supercapacitors. The previous part of this article established the context for supercapacitors and explained their structure in simplistic terms; obviously, this is a component with deep physics, chemistry, materials-science considerations, and manufacturing issues. The first widely […]
Energy storage by the Farad, Part 1: Supercapacitor basics

Engineers can choose between batteries, supercapacitors, or “best of both” hybrid supercapacitors for operating and backup power and energy storage. Many systems operate from an available line-operated supply or replaceable batteries for power. However, in others, there is a need in many systems to continually capture, store, and then deliver energy to power the system. […]
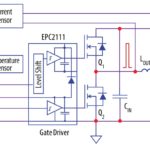
GaN is cost-effective in motor drive applications
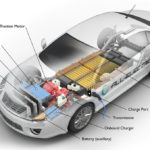
By Eric Persson, Senior Principal Engineer AC-DC Applications, Infineon Technologies We take motors for granted – they have been with us since Benjamin Franklin experimented with electrostatic types nearly three hundred years ago – but the days are long gone when they were controlled in a simple on/off way. Motors in today’s applications, from clothes […]
Increasing power conversion efficiency with new semiconductor technologies
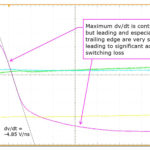
by Anup Bhalla, VP Engineering, UnitedSiC Wide bandgap semiconductors are enablers for highly efficient power conversion. There is a choice of devices to use, including SiC FETs, a silicon and SiC technology hybrid. This article discusses the characteristics of the devices in comparison with other approaches. High efficiency is the universal aim in the world […]
Basics of motion-control profiles, Part 3: Implementations
How a motor ramps its angular position or rotational velocity from a starting point to the intended target value is a complicated topic which modern motor controllers address in many ways. Part 2 of this article looked at the basic ramping trajectories of the motion-control system. This final part briefly explores some standard motion-control ICs […]